



自ら判断し収穫するロボットで日本の農業問題を解決!
日本の農業の未来を切り開くロボット
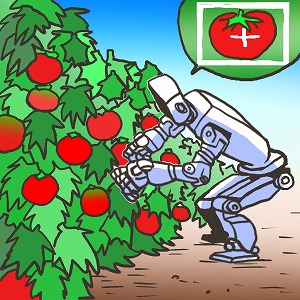
柔らかいトマトをつぶしたり傷つけたりしないように収穫するロボットの開発が進められています。日本の農業問題のひとつは、高齢化による農業人口の減少です。収穫ロボットが導入されれば、農業従事者の作業負担を軽減し、新規就農の促進にもつながると期待されています。トマトは高温高湿な温室内での栽培のため、収穫の作業負荷が大きい野菜です。同時に屋内なので、ロボットを導入しやすいというメリットがあります。
トマト収穫ロボットの仕組み
トマト収穫ロボットが搭載するのは、RGB-Dセンサのカメラです。RGB-DのDは「深度」を表し、色の三原色のRGB画像だけでなく、目的物までの距離を取得することができます。赤い物体の領域をコンピュータがトマトと認識し、その中心に向かってロボットアームを伸長、目的の距離まで達したところで先端のハンドで、トマトを収穫します。トマトをつぶしてしまわないのはもちろんのこと、傷をつけて商品価値を落としてしまわないように、ハンドの形状にも工夫が必要です。人間の指に近い形や、トマトを包み込むようなお玉型のハンドが考案、検討されています。
めざすのは自分で判断できる収穫ロボット
工業用品と違い、トマトは柔らかいため傷つきやすく、大きさも均一ではありません。そのため、工業用ロボットの転用では解決できないことが多々あります。また、トマト収穫ロボットはトマトを色で認識するので、実の色むらや葉の陰、光の変化による見え方の違いなど、開発には自然が相手ならではの課題があります。
本来ロボットは、一つひとつ決められた命令で作業をこなすことを得意としていますが、これらの課題を解決するために、よりあいまいな命令で動くロボットが検討されています。そして最終的には、収穫時に人間が周りの環境から得ているのと同じような情報を温度センサや光センサで解析し、自分で判断して収穫できるロボットをめざして開発が進められています。
関連する
SDGs
![選択:[SDGsアイコン目標7]](https://telemail.jp/shingaku/requestren/img/data/SDGs-7-active.png )
![選択:[SDGsアイコン目標9]](https://telemail.jp/shingaku/requestren/img/data/SDGs-9-active.png )
![選択:[SDGsアイコン目標12]](https://telemail.jp/shingaku/requestren/img/data/SDGs-12-active.png )
※夢ナビ講義は各講師の見解にもとづく講義内容としてご理解ください。
※夢ナビ講義の内容に関するお問い合わせには対応しておりません。
先生情報 / 大学情報
山陽小野田市立山口東京理科大学 工学部 機械工学科 准教授 池田 毅 先生
興味が湧いてきたら、この学問がオススメ!
ロボット工学先生が目指すSDGs


先生への質問
- 先生の学問へのきっかけは?
- 先輩たちはどんな仕事に携わっているの?
