



やわらかいロボットをつくる 生物のような柔軟な動きをめざして
「ソフトロボット」とは
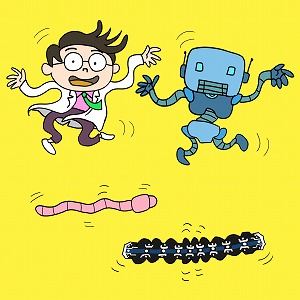
硬くて力強い産業用ロボットに対して、近年は人間の筋肉のようにしなやかに動く「ソフトロボット」が注目されています。ロボットは、目や触覚のように情報を集める「センサ(知覚系)」、頭脳のように判断する「制御系」、そして筋肉のように動く「アクチュエータ(駆動系)」でできています。アクチュエータとは、電気などのエネルギーを動きに変える部品のことです。産業用ロボットなどでは、モータがその役割を担いますが、ソフトロボットの開発ではアクチュエータそのものを柔らかい材料でつくることをめざします。
ミミズのように移動する細長いロボット
具体的な研究の一つが、ミミズのように進むロボットです。ミミズは自分の体の太さほどの隙間があれば、体を伸び縮みさせながら前に進むことができます。この特徴を生かして、配管の中や床下など、人が入れない狭い場所を点検するロボットが考えられています。ミミズの動きを模倣して、伸縮動作を伝播させる蠕動(ぜんどう)運動を再現できれば、ロボットが構築できます。さらに、前に進む仕組みを数学や物理を用いて解析することで運動モデルをつくり、シミュレーションを重ねることで、効率よく進む方法を探ります。
やわらかさを生かした動きの実現へ
硬いボディの産業用ロボットに対して、ソフトロボットは周囲への当たりが柔らかいため、医療や介護、生活支援の場面での活躍も期待されます。人にぶつかってもけがをさせにくく、人が安全に同じ空間で働けることも大きな特徴です。また、柔らかい材質は環境に「面」でなじむため、これまで得られなかった情報を感じ取れる可能性もあります。現在は、ミミズ型ロボットが滑らずに進めるよう、動く時に生じる「摩擦」をコントロールする研究も進んでいます。高分子材料のソフトアクチュエータや形状記憶ポリマーなどを用いて、止まりたい時は止まり、進みたい時は進むように摩擦を調整し、より自然な動きを実現しようとしています。
関連する
SDGs
![選択:[SDGsアイコン目標9]](https://telemail.jp/shingaku/requestren/img/data/SDGs-9-active.png )
※夢ナビ講義は各講師の見解にもとづく講義内容としてご理解ください。
※夢ナビ講義の内容に関するお問い合わせには対応しておりません。
先生情報 / 大学情報

東京電機大学 未来科学部 ロボット・メカトロニクス学科 教授 釜道 紀浩 先生
興味が湧いてきたら、この学問がオススメ!
ロボット工学、制御工学先生が目指すSDGs

先生への質問
- 先生の学問へのきっかけは?
- 先輩たちはどんな仕事に携わっているの?
